
Automated and cobotised cell to control the assembly of aeronautical accessories.
Some characteristics of this autonomous technology:
- Production mode: automatic control – loading up to 6 parts – 400 part numbers,
- Learning mode: construction of a range (creation / validation of trajectories + image acquisition + installation of control points),
- Real-time monitoring of the control cycle,
- Each image processing has tools allowing the operator to define, adjust and verify a control (point, circle, polygon, vector),
- Creation/Validation of a trajectory with a cobot or robot,
- Image acquisition module,
- Image processing module: selection of the type of control in a drop-down menu, tool to set up an algorithm, test on the image: display of the result of the algorithm, help to guide the operator on the actions to be carried out,
Examples of detection by image processing:
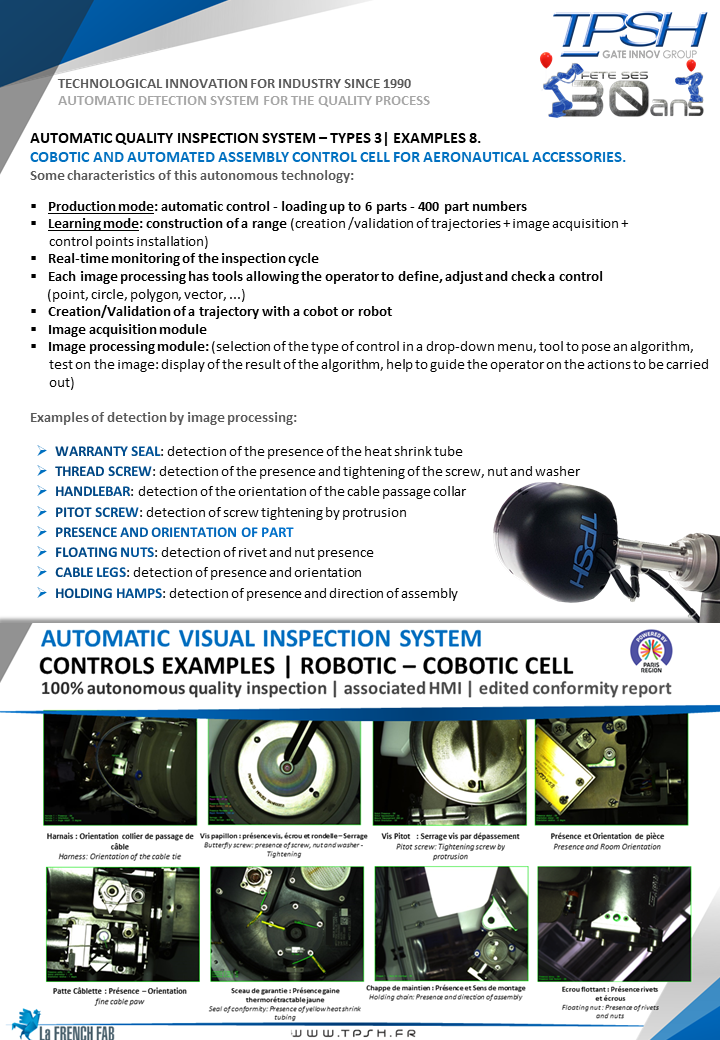
– WARRANTY SEAL: detection of the presence of the heat shrink tube
– THREAD SCREW: detection of the presence and tightening of the screw, nut and washer
– HANDLEBAR: detection of the orientation of the cable passage collar
– PITOT SCREW: detection of screw tightening by protrusion
– PRESNCE AND ORIENTATION OF PART
– FLOATING NUTS: detection of rivet and nut presence
– CABLE LEGS: detection of presence and orientation
– HOLDING HAMPS: detection of presence and direction of assembly
For more information, ask us for technical information by email : info@tpsh.fr or by phone at +331 69 11 91 91